 CV
CV
 GitHub
GitHub
 jinhac174@gmail.com
jinhac174@gmail.com
 LinkedIn
LinkedIn
NeurIPS
2026 · Under Review
Learning Multimodal One-step Flow Policy via Value-weighted Optimal Transport
arXiv
Paper
Research Intern · KAIST
Humanoid Robot Learning · Loco-manipulation · Embodied AI
Research Intern @ HuGeLab, KAIST AI Graduate School
Advised by Prof. Beomjoon Kim
I am an undergraduate research intern at HuGeLab (KAIST AI Graduate School), working on humanoid robot learning. My current research focuses on locomotion, whole-body control, and developing robots that can robustly navigate and interact in complex, unstructured environments.
Broadly, I aim to build scalable and generalizable learning methods for embodied systems — methods that transfer across tasks, environments, and embodiments, allowing robots to acquire useful behaviors from limited data.
HuGeLab, KAIST AI Graduate School
Research Intern · Advised by Prof. Beomjoon Kim
Working on humanoid robot learning with emphasis on locomotion, whole-body control, and robust behavior in complex environments. Developing learning-based approaches that enable humanoid robots to move through diverse settings, adapt to physical conditions, and coordinate balance, navigation, and interaction. Broadly interested in scalable, generalizable methods that allow robots to acquire useful behaviors beyond narrow task-specific settings.
DILLAB, Yonsei University
Research Intern · Advised by Prof. Jongmin Lee
Developed efficient multimodal flow policies via value-weighted optimal transport for offline reinforcement learning. Learned value-aware multi-step reference policies from offline datasets and distilled them into one-step target policies. Used entropic optimal transport over action samples to improve multimodal policy distillation, achieving strong performance across diverse benchmark tasks. This work resulted in a NeurIPS 2026 submission.
RLLAB, Yonsei University
Research Intern · Advised by Prof. Youngwoon Lee
Built and analyzed baseline pipelines for humanoid loco-manipulation in simulation, including motion-prior training from retargeted human-motion datasets. Authored an undergraduate term paper assessing retargeting methodology and its effects on learned motion quality and stability. Studied reusable motion components as a path toward better task transfer.
MIRLAB, Yonsei University
Research Intern · Advised by Prof. Youngjae Yu
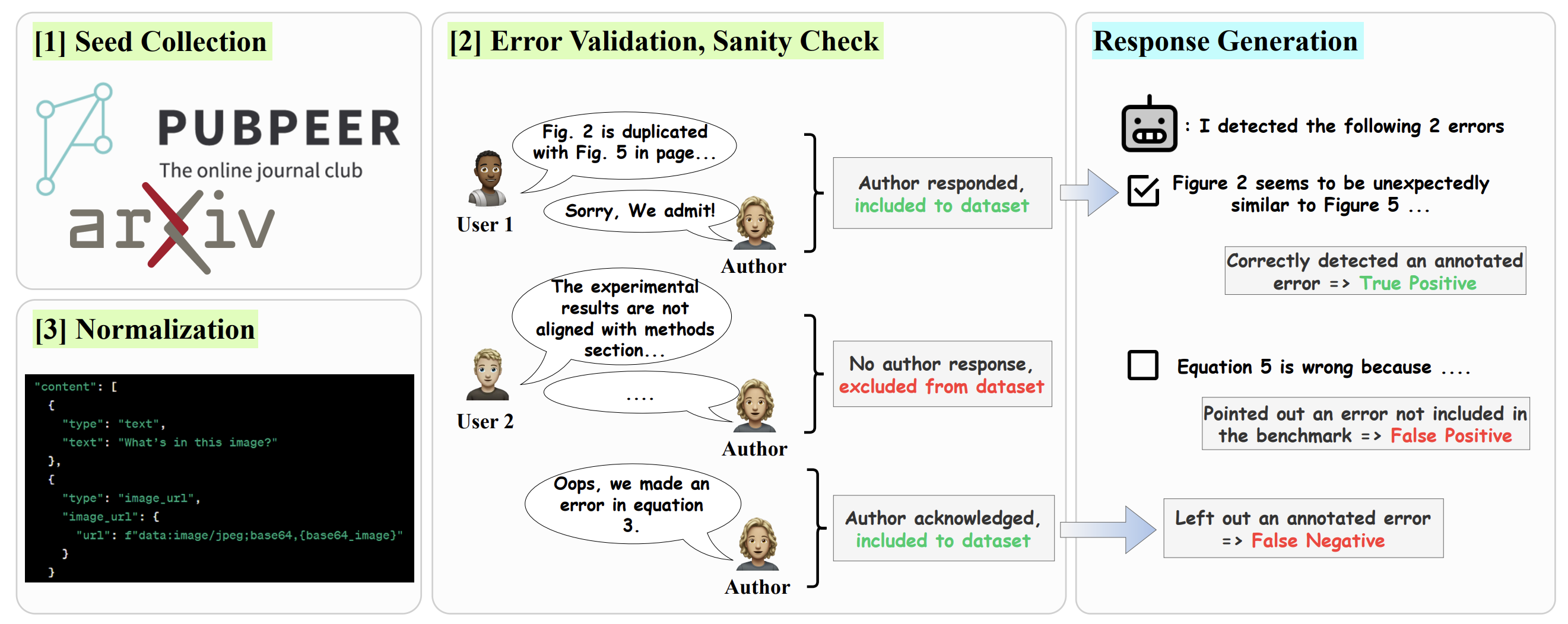
Trained in lab workflows and research practices for robot learning. Studied multi-modal learning and built familiarity with Isaac Sim for RL environments. Contributed to an LLM benchmarking study (SPOT) by processing and labeling datasets for experiments evaluating LLMs' ability to assess scientific papers.
Korea Defense Intelligence Command
Translator / Interpreter · Mandatory Military Service
Completed military service as a translator and interpreter supporting intelligence operations. Translated and interpreted classified documents and meetings for KDIC and partner agencies including NIS, NGA (U.S.), and several allied counterparts.
Yonsei University, Underwood International College
B.S. Candidate — Computer Science & Nano Science and Engineering
VEX Robotics — Team 1010B, WVSS
Team Lead · VEX Robotics Competition
Led Team 1010B through three competition seasons (Starstruck, In the Zone, Turning Point). Directed the full robot-development cycle — game strategy, mechanical and electrical design, programming autonomous routines, and competitive driving. Won 1st place at the BC Provincial Championship and advanced to the VEX Robotics World Championship as a Science Division Finalist.
West Vancouver Secondary School, Canada
International Baccalaureate Diploma
2nd Place — Physical AI 26H Robotics Hackathon
Kernel Academy & Doosan Robotics
Built a natural-language-guided pick-and-place system on a Doosan E0509 robot arm using RGB-D sensing, vision-language reasoning (GPT-4o, SAM2, Whisper), and ROS2 execution. Contributed to Isaac Sim environment setup, camera calibration, domain randomization, and real-robot transfer. Won 2nd place among university teams.
Top Award — Korea Defense Intelligence Command AI Security Competition
Awarded by Commander Sangho Moon, KDIC
Proposed an on-device AI framework for military systems with partial internet exposure, designed to support operational convenience while strengthening protection against security vulnerabilities and malicious misuse.
Peer Mentor — Yonsei–Nexon RC Creative Platform
RC Education Center, Yonsei University
Selected as peer mentor based on prior 1st-place performance. Guided participating teams and received an official mentoring certificate from the Dean.
Honor Roll
Awarded by the President of Yonsei University
1st Place — Yonsei–Nexon RC Creative Platform
RC Education Center, Yonsei University · 1st of 90 teams · $10K prize
Led a 5-member team in a university-wide social-impact startup competition co-hosted with Nexon. Designed an automated revolving-door assistance system for people with mobility impairments — developed a 3D-printed prototype and presented the design rationale to judges and organizers.
Science Division Finalist — VEX Robotics World Championship
Kentucky, USA · Team 1010B · 600 qualified teams worldwide
Ranked as Science Division finalist (top finish within a 100-team division), advancing to the division final against the top teams from other divisions.
1st Place — VEX Robotics Canada BC Provincial Championship
British Columbia, Canada · Team 1010B, WVSS Robotics
Led Team 1010B to 1st place at BC Provincials, earning qualification to the VEX Robotics World Championship. Directed the full development cycle — game strategy, mechanical and electrical design, programming, and competitive driving — across three competition seasons.
Feel free to reach out for research discussions, collaboration, or general inquiries.